




Human Powered Aircraft
Building, testing, tuning and in the end flying. It is possible…
Computer design by Derk Thijs jr.
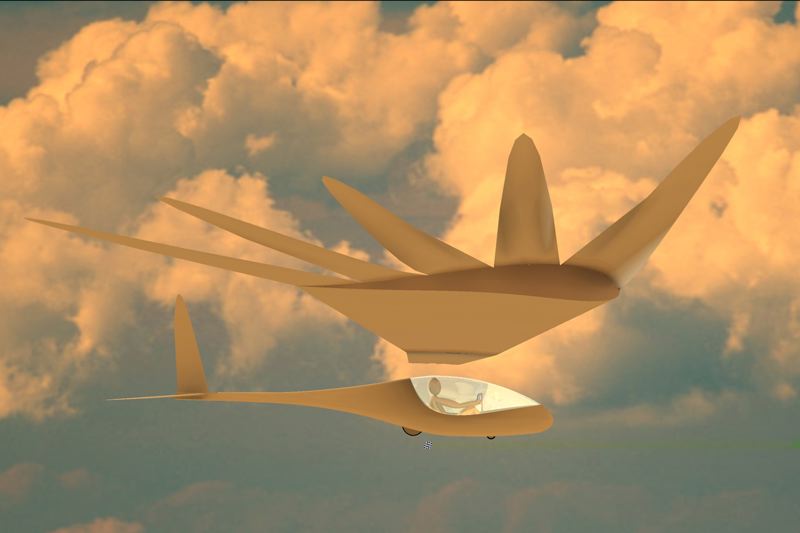 If a propeller Human Powered Aircraft can fly with 15-20% loss in propeller and 15-20% loss in drive system from pedals to propeller than this plunging wing device must be more efficient . Loss in rowing system and Dyneema® cable on Sneks are much lower than chains and sprocketwheels. There will be practically no loss in the movement of the wing; optimal wing loads can be achieved all over the wing.
If a propeller Human Powered Aircraft can fly with 15-20% loss in propeller and 15-20% loss in drive system from pedals to propeller than this plunging wing device must be more efficient . Loss in rowing system and Dyneema® cable on Sneks are much lower than chains and sprocketwheels. There will be practically no loss in the movement of the wing; optimal wing loads can be achieved all over the wing.
This is going to be a great glider too; we do not have that primitive airbrake called propeller!!
What’s the use of it?
It might not be a vehicle for daily use, than it is only the kick of filling this clear blank spot in aeronautical history. So the aircraft after breaking a few records would be stalled in a shed and catch a lot of dust like most of its other HPA predecessors. :-( It could be a nice object for a flight museum or art object (we have seen lesser art being sold for more than this plane is going to cost…)
 But the goal for me is to explore this technical possibility; from such experiments there is always a spin-off in technical solutions that can be very helpful in other fields of technique. And I would not be astonished at all if this apparatus could work so fine that a complete airworthy plunger could be developed that could be a serious and safe means of transport and off course an ultimate fitness machine.
But the goal for me is to explore this technical possibility; from such experiments there is always a spin-off in technical solutions that can be very helpful in other fields of technique. And I would not be astonished at all if this apparatus could work so fine that a complete airworthy plunger could be developed that could be a serious and safe means of transport and off course an ultimate fitness machine.
Lets first find some funds to get started :-) I find it hard to tie my own hands down to my rowingbikes and not start actually creating this machine :-)
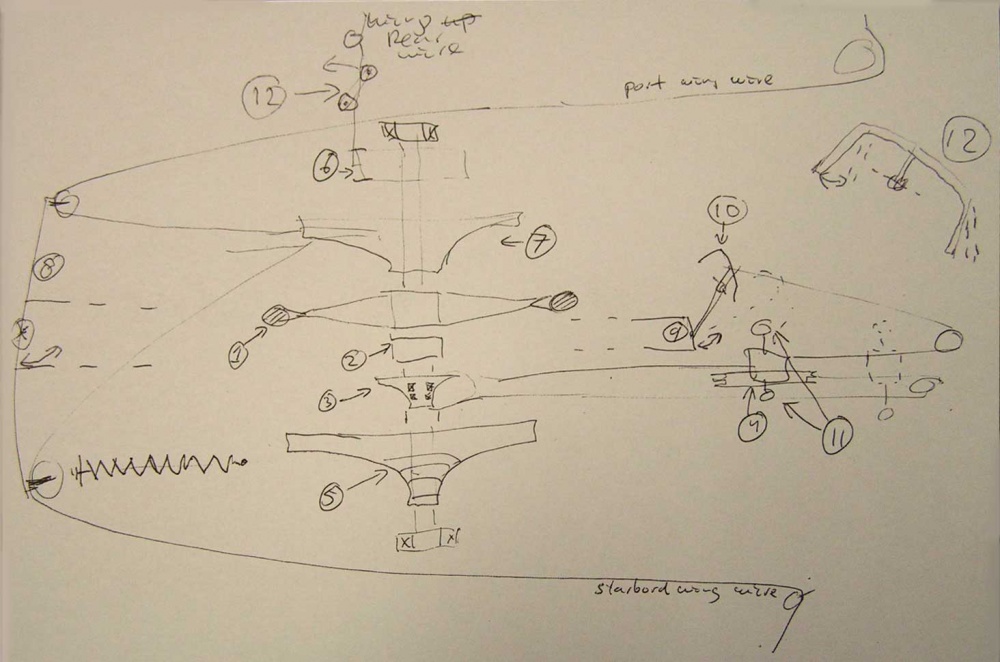
Brief explanation of the technical principal drawing
 Rear wheel propelled only during take off
Rear wheel propelled only during take off- Freewheel unit attached to rear wheel and (de)coupable to main Snek (3)
- Main snek: works rowingbike conventional with revolvershifting system on footslider (4) commanded by right thumb lever. The main snek can be coupled either to wheel (1) or central flightdrive axis (no number) with a simple shifting system on the axis.
- Foot slider with pedals (11) ; pedals left and right can be moved separately for rudder control, like conventional gliders
- Shock cord Snek, This Snek connects a Dyneema® rope to strong springs or shock cords in the tail. By means of this spring and Snek a balance is created between the weight of pilot and hull and the main wing. the pilot can bring the wing in any high or low position without having to add force; there is a situation of equilibrity so that the force of the rower is used to propel air down and rearward during his stroke. (Here the conventional function of a Snek or fusee is used like in clockworks)
- Drum for rear wing wire; this is the only cylindrical drum at the central flightdrive axis ( no number)
- Snek with double groove for left and right Dyneema® front wing wires. The helicoidally shape of this Snek is chosen in such way that the angle of attack of the wing stays constant during a stroke of the rower (pilot)
- Roll control lever which is connected to lever 9 connected to the handle bar 10
- Steering bar lever that is used to command roll control; steer to the right and weight will travel to the right (right front wing wire is shortened versus the left one)
- More or less rowingbike conventional handle bar that is connected with a rowingbike conventional armstroke cable to the footslider for propulsion. The handle bar has an extra piviting point 12 by which means lever 12 at the wing rear wire can alter pitch of the main wing. Changing pitch of the wing has no influence on the pitch of the hull as the sum of the 3 attachment points are chosen in the center of gravity of the hull (with pilot).
- Pedals on footslider that give rudder control in a conventional way.
- Pitch control of the wing in a movement of the wrist at each stroke (very similar to rowing a skiff).
Click the image for an animation
The only control not yet clearly solved is pitch control of the hull. The up and and down rudder could be trimmed in optimal lift/ drag speed by putting another axis on the steering bar at point 12, so that steering bar left down e.g. would be nose down, right down nose up. (only usable when left thumb button is pushed)
For emergency nose down commands pushing the whole steering bar forward so that slack in the armstrokecable is achieved could be a usable and conventional feeling nose down control.
Why do I put this design on my website in such an early stage?
Did you patent it?? will be a question asked. Who cares… Lets build a nice machine!
Do you doubt if this will work? have a look at these links and see some similar designs that proved to work, just as this roeivliegtuig will do given time… :-)
www.aquaskipper.de
www.ornithopter.ca
www.delfly.nl
Human Powered Ornithopter
Very similar to Derk’s plunging wing design is the design of a human powered ornithopter by a group of students at Ontario University. They have actually build it and the propulsion system is very similar to the rowingbike. That is why rowingbike.com sponsors this very interesting project. For more info look at
www.hpoproject.ca. The testing and further development of this aircraft will be continued summer 2010.